九游娱乐(中国)有限公司-官方网站 > 新闻资讯 >
-
九游娱乐(中国)有限公司-官方网站但对阿维塔06这种带雷达的车来说-九游娱乐(中国)有限公司-官方网站

家东说念主们九游娱乐(中国)有限公司-官方网站,今天整大活了!
“阿维塔06”硬刚“特斯拉Model 3”,一个是激光雷达,一个是纯视觉,到底谁才是智驾界的终极老司机?
不知说念内行有莫得发现,咱国产车的智能驾驶清一色王人在堆激光雷达,但特斯拉这个番邦选手却死磕纯视觉决策,对峙“裸眼决骤”。那我就意思了,这激光雷达和纯视觉,到底谁更利害呢?
口说无凭,来场实战望望。这不,极果君就搞来两台狠货——头顶激光雷达、搭载华为高阶智驾的阿维塔06,和完全不带雷达、纯靠录像头的特斯拉Model 3,来场中好意思智驾巅峰对决!!!
在庄重测试之前,先给内行顶住一下我们手上这两台车的基本信息和测试神气。
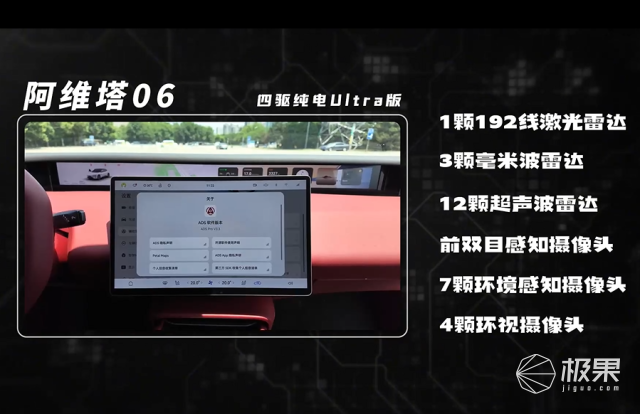
这辆阿维塔06,是纯电四驱Ultra版,它在车顶配备了一颗192线激光雷达,全车3个毫米波雷达,12个超声波雷达,还有前双目感知录像头,全车7个环境感知录像头,和4个环顾录像头,系统版块为ADS Pro V3.3。
另一辆特斯拉Model 3是长续航全轮驱动版,它配备了前双目感知录像头,但它全车周围是不带任何雷达的。也就是说,它的智驾,沿途要靠车身周围的7颗环境感知录像头来已毕,而版块方面,则为FSD V13.2.6。
现在两车的智驾设定,均为最强状况,只是在变说念逻辑上,我们诊疗到了闲居的尺度格式。
门道与神气方面,我们将从西直门早岑岭、掉头与环岛、巷子与泊车、以及暗淡的乡间演义念四个部分来进行玄虚对比。
那么谎话未几说,来望望这两辆车的极限智驾到底怎样?
北京的西直门立交早岑岭,是我们的经典考题。画面中可以看到,阿维塔06和特斯拉Model 3在主辅路复杂汇流时王人推崇挺可以,王人能娇娆地“驱驰钻营”,与周围车辆天然博弈。
但是西直门立交桥确凿的难点,不在于门道复杂,而是每条匝说念旁王人紧挨着非纯真车说念——你盘桥时,行东说念主和电瓶车也在盘桥。最要命的是,拐进匝说念不仅要避开车辆,还得重视那些奔突的电瓶车。
在这方面,阿维塔06和特斯拉Model 3的感受就很不同了。
阿维塔06在准备向右插足盘桥时,操纵是一直有非纯真车在直行通过的,06亦然很轨则的进行了泊车礼让,等多半量非纯真车往日后,才抓准空当插足了盘桥。只不外它刚插足盘桥,前边就堵上了,它就思从左侧绕行,但是再往前没多远就是实线了,是以它刚绕了一小下,就立即打了转头了。
包括在右转汇入匝说念时,阿维塔06刚礼让完行东说念主准备加快,陡然一辆电瓶车横穿而过。车辆立即平顺地住手加快,保持匀速,待电瓶车通事后才连续提速——整套应付行云活水,全程不外一两秒,既没急刹保险安全,又确保了乘员惬意。
再看特斯拉Model 3,相同是右转上盘桥,濒临电瓶车时却过于严慎,老远就开动礼让,致使不敢前进,临了不得不踩油门东说念主机共驾才完成转弯。更尴尬的是,它顺利压着非纯真车说念实线拐了进去,和我们此前开Model X在西直门的推崇一模一样。
在出盘桥时,左侧也一直有贯穿不断的电瓶车和纯真车,Model 3照旧保持着严慎的嗅觉,不敢往前走,致使它王人莫得旅途有假想了,一直礼让,临了亦然进行了东说念主机共驾通过。
其实我们也试了,若是就是不管它,不踩油门进行催促,它王人会等通盘电瓶车王人走干净之后,再拐入盘桥,恶果照实会低好多。
第二轮测试时早岑岭已过,电瓶车减少,Model 3的盘桥动作照实清楚不少。但它依然会压着半条非纯真车说念转弯,巧合致使顺利骑上非纯真车说念行驶——这就有点不对事理了。
可能有东说念主会说特斯拉这样更安全,但这样低的通积恶果,还不如我我方开。嗅觉它对行东说念主和非纯真车的判断也曾不是严慎,简直是神经质了...最夸张的是,我们闲居行驶时,对向车说念有个自行车调头,离我们八丈远呢,Model 3竟然顺利急刹,这还能叫安全驾驶吗?
更夸张的是桥下调头,惟有近邻有行东说念主或非纯真车,Model 3连拐进去王人不敢,非得等透彻没东说念主才行动。不外说真实,等清场后它的调头动作倒是相等丝滑。
阿维塔06则完全相背——它敢和行东说念主、非纯真车博弈,只不外调头时总有个奇怪操作:即便车头已拐出,泰半个车身王人进车说念了,明明可以加快完成调头,它却非要延缓慢挪一段,哪怕后方没车也这样。论动作清楚度,照实莫得特斯拉Model 3丝滑。
不外必须承认,阿维塔06在西直门早岑岭的推崇稳如老狗,稳到我共事王人直呼枯燥。临了连车机小艺王人忍不住出来簸弄了。
但特斯拉Model 3在西直门早岑岭全程的感受,就莫得那么放荡,不仅是需要时时的东说念主机共驾,舛错Model 3它不按照导航走,这就很奇怪了。
因为我们西直门早岑岭的测试,为了让车辆能在西直门多盘桥,并复返起点近邻,我们是会添加途径点的,测了这样多车,第一次碰到这种经过途径点,不详是到达尽头后,要重新有假想门道,再跑一遍的情况。
比如说我们经过了第一个途径点,闲居该直行,设施Model 3就是要重新有假想门道,要右转兜一圈,思再次经过途径点。一开动我以为是偶发,没思到在测第二遍的历程中,情景再现了,又是经过途径点,开动重新有假想门道,要再跑一圈。不得已,这两次我们王人进行了遴选。
这还没完,还有更离谱了,在测第二遍的历程中,它致使在到达尽头之后,要再次有假想门道,重新经过尽头,这就让东说念主很难评了。不知说念诸君特斯拉的车友,有莫得碰到过这种情况。
最终,西直门妖魔立交早岑岭神气,收获如下:
阿维塔 06
第一遍 16分23秒
第二遍 12分26秒
特斯拉 Model 3
第一遍 19分00秒 1遴选 4东说念主机共驾
第二遍 12分07秒 1遴选
阿维塔06全程0遴选,Model 3却屡屡需要东说念主工搅扰。
其实通过西直门早岑岭这单一神气,就能看出来阿维塔06这种激光雷达决策,和特斯拉Model 3这种纯视觉决策的一些差距了。
我们先不谈特斯拉的两个原土化短板:一是因国内说念路考验不及导致的时时占用非纯真车说念非法;二是舆图与智驾系统协同差激发的门道有假想紊乱问题。而是顺利来分析一下,这俩车在西直路途段的推崇各异。
前边咱说过,Model 3在应付车与车之间的加塞博弈时,胆子挺大的,操作也很丝滑,但一碰到东说念主和非纯真车就一会儿严慎起来,比如要拐弯插足匝说念,比如掉头,再比如阿谁对向调头的非纯真车。
但阿维塔06就不会这样,非论是在应付车与车的博弈,照旧车与东说念主以及非纯真车的博弈时,推崇王人很平衡且踏实。
其实这分离,就在雷达上。特斯拉Model 3莫得任何雷达,智驾绝对靠车身周围的录像头来已毕,比如Model 3上的前双目感知录像头,其责任旨趣,其实就是在模拟东说念主眼的责任旨趣,通过策动两个录像头拍摄图像的 “视差”,来精确测算前列物体的距离、深度和三维坐标。
这里的难点就在于,要从录像头拍摄的二维画面中,筛选并索要出灵验信息,然后通过算法模子来构建前列的环境,尤其是在那种低对比度的场景中,比如夜晚穿深色衣裳的东说念主以及深色车漆的车,比如布景太过杂沓的环境,比如枯竭纹理的光滑路面和墙面等,这些场景关于画面信息的索要,难度会更高,关于算法模子的条目也更高。
是以,特斯拉这种纯视觉决策的智驾,本色上照旧在欺诈录像头拍摄的二维画面来进行分析策动,它关于圮绝物距离的测量,依靠的是盘曲算计。
而毫米波雷达和激光雷达,则可以顺利辐照电磁波或激光束,打到圮绝物上并策动其反射时候,顺利输出与圮绝物之间的距离数据的,这种顺利的物理测量,其实要比录像头的算法算计,会更靠谱一些。这亦然为什么,在早岑岭这种东说念主、车、非纯真车王人好多且夹杂的场景中,阿维塔06的推崇会更踏实一些。
而特斯拉Model 3就更畏惧,原因就是环境太复杂,Model 3收集到的画面,要把每一个交通参与者的信息王人拆分出来,难度会更高。这些及时变化的场景,非论是关于算法模子,照旧芯片算力,压力王人不小。
但对阿维塔06这种带雷达的车来说,其雷达自己是可以顺利定位圮绝物的,更别说高精度的激光雷达致使能把圮绝物轮廓王人测量出来,再纠合录像头收集画面,这种多传感器的和会,就可以让其在复杂环境中的推崇,愈加洋洋万言。
这就不宽敞释,为何Model 3在与其他车加塞和博弈时,胆子就很大,很敢走。因为车这种大尺寸物体,其位置和距离判断起来更容易一些。天然咱也不可忽略,自己特斯拉的智驾逻辑,就对行东说念主和非纯真车会更严慎。
其实不单特斯拉,险些通盘品牌的智驾,王人会对行东说念主和非纯真车的安全冗余度更低一些,这王人是出于对罅隙交通参与者的保护。但不管奈何说,特斯拉在这种场景中,照实体感更差。
天然,除了上头那种复杂环境,在一些强光逆光、明暗突变、相等暗淡、不详雨雪雾霾等粗劣见度恶劣场景时,特斯拉这种纯视觉决策的智驾,受到的影响也会更大一些。
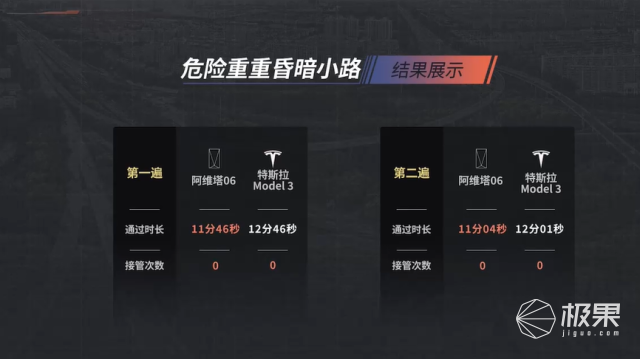
那咱就机不可失,来危机重重暗淡小径上试试。
我们先不看推崇,先看收获:
阿维塔
第一遍:11分46秒
第二遍:11分04秒
特斯拉
第一遍:12分46秒
第二遍:12分01秒
特斯拉Model 3和阿维塔06正反各跑了一遍,最终设施如上。
两辆车均莫得出现遴选。难倒这纯视觉决策和激光雷达决策,只是只是快慢的分离?ok,接着望望这哥俩的刺目推崇。
最初是特斯拉,Model 3在这段暗淡路段的推崇显着更保守——非论是直行、转弯照旧通过桥洞,车速历久比阿维塔06慢上一截。
比如说在归并段直路,且前列均无其他车讳饰,阿维塔06的速率就是要比Model 3快小数点。
我开首不笃定Model 3减慢是出于夜间明后问题,照旧其智驾本就保守。为此,我们成心对比了白昼环路行驶数据——设施发现特斯拉不仅不慢,反而比阿维塔06更快。昭着,夜间明后不及才是导致Model 3主动减慢的舛错要素。
话说转头,Model 3在这段暗淡的小径上,除了速率慢一些,其实举座推崇还挺好的,比如过桥洞时会主动礼让来车,通过大角度盲弯时也会贴右侧延缓通过,这些讲求操作王人给乘客带来了十足的安全感。
但有小数,在无标清醒段上,Model 3会默许居中行驶,而阿维塔06则历久保持靠右通行。
接着望望阿维塔06的推崇。它在碰到前列慢速三轮车时,会立即发起绕行,动作松弛,哪怕是它在右侧违停了,此时左侧还有对向的大货车,06王人能精确的从中间通过。
后续操作也很精彩,它先绕行电瓶车,此后从出租车右侧灵活切入,临了精确把控车距完成右转,整套动作行云活水,尽显老司机风采。
再比如对向有大车,右侧路边有停着的三轮车,前边还有一辆电瓶车,阿维塔06先是向右打标的礼让大车,然后向左打标的绕行三轮。这还没完,对面又有一辆大车开了过来,此时路边还违停了一辆面包车,06亦然先让大车往日,才对面包车践诺了绕行动作,给东说念主嗅觉畸形顺畅。
过桥洞也一样,我们在过一个桥洞时碰到了对向来车,此时两边车辆王人已插足窄小桥洞,阿维塔06展现出类东说念主的决策才调:延缓、靠边泊车礼让,待对向车辆通事后才重新起步,整套窄路会车操作号称教科书级别。
但它也不是每次王人会让。比如有一次我们和对向车王人插足了桥洞,但是我们会稍早一些,是以两辆车就在洞里顶上了,但这时候06就不会让它,而是等对向车倒出桥洞后,我们才闲居起步通过。
有个很显着感受就是,配备了ADS3.3版块的阿维塔06,在转弯、过路口,以及过桥洞时,显着比老版块的其他华为智驾车型要更稳。至少它会提前延缓,以一个更合理,更安全的速率去通过这些特殊路段,这照实要安全不少。
玄虚来看,非论是阿维塔06照旧特斯拉Model 3,这两者在这种暗淡的无标线小径上,推崇王人值得战胜,至少王人没遴选,这就很好。
只不外特斯拉老问题依然存在——对行东说念主及非纯真车的过度明锐。即便在东说念主车珍视的路段,惟有路边陡然出现行东说念主或电瓶车,Model 3必定会泊车礼让,这种保守计策照实影响了通积恶果。
但必须承认,特斯拉的智驾模子照实利害,能在这样黑环境中连续闲居用智驾,足以证实其不仅考验量很大,而且多样情况王人考验过。相较于东说念主类驾驶员在粗劣见度下的视觉局限,系统通过数据清洗和算法明白,反而能更精确地识别路况,这种时代上风照实值得战胜。
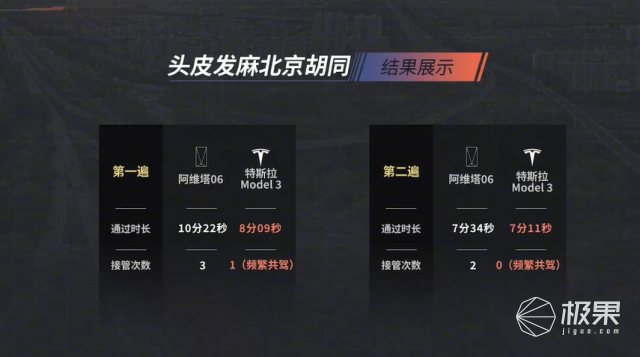
接下来我们再来望望胡怜悯况,最初看收获:
阿维塔
第一遍:10分22秒 3次遴选
第二遍:7分34秒 2次遴选
特斯拉
第一遍:8分09秒 1遴选,时时共驾
第二遍:7分11秒 0遴选,时时共驾
是不是没思到,竟然特斯拉速率更快,遴选更少。你一个歪果车,在北京巷子里的推崇,竟然把华子逆袭了,这是为什么呢?我们来缓慢看。
最初是阿维塔06开动饰演,它在刚右转插足巷子后,右前列就有一辆车在路边倒车,06涓滴不瞻念望,顺利绕了往日,紧接着左侧还停了一辆车,06亦然第一时候绕行通过。再往后,左侧有花园,右边有行东说念主,它也绝对绕了往日。
致使当左侧陡然出现骑行大爷时,06也立即作念出避开决策——聪惠地借用了右侧大院门口的旷地完成避开,通盘历程行云活水。
既然巷子里开的如斯老司机,它为什么又会出现遴选呢?
咱来举两个例子望望。
第一个例子,是在一个大院门口,那时再往前的路,两侧王人停满了车,是以就必须得向左前列走才调往日。阿维塔06到这里后,先是延缓刹停,并开动有假想向左绕行,设施左侧有电瓶车过来,它就取消了。当它再准备发起绕行时,没思到又来车了,绕行再次取消。此时我决定不等了,开动踩油门催促它往前,但06就是不敢走,在小数点往前蹭,而且还不太安详打标的。最终,它离前车太近,我才东说念主为遴选,开过了这段窄路。
第二个例子也雷同,相同右前列有车屈膝,此时对向还有来车,我亦然在不断踩油门催促往前挤的历程中,导致贴前列车太近,不得不进行了遴选。
内行战胜就意思,特斯拉Model 3在相同的情况下,难倒不需要遴选?你别说,还真毋庸,至少绝大部分情况下毋庸。比如相同在大院门口,诚然Model 3开到这里,它也不敢走,但经过驾驶员不断踩油门催促,它是可以精确把控标的,小数点挤过来的。
但必须得承认,Model 3比阿维塔06车宽窄了10多厘米,是以在濒临相同宽度且环境相似路况时,Model 3应付起来的难度要更小小数。但话说转头,你阿维塔06关联词带激光雷达呀,按理来说应该判断更精确,关联词你这???
好了,簸弄归簸弄,除了车宽这一影响要素,这哥俩在濒临相似难度的路况时,最主要的分离,照旧智驾计策的不同。
比如Model 3濒临难度较大环境时,尤其是在窄路碰到行东说念主和非纯真车,它照实会更明锐,更不敢走,这个在之前神气里说过了,即等于在巷子也不例外。但Model 3比拟好的小数是,它我方过不去的场所,只需要你踩油门,东说念主机共驾,绝大部分情况它王人可以我方掌控标的,告成通过。
但阿维塔06不同,它诚然没那么明锐,在应付东说念主和非纯真车等交通参与者时会更舒缓,但一朝它被卡住,停在何处,你踩油门催促它,你思东说念主机共驾,让它我方打标的通过圮绝,收着力显着会低不少。
是以说像阿维塔06这种自主品牌的智驾,其实它东说念主机共驾嗅觉会更弱一些,可能亦然因为传感器多,车辆更多的照旧思依赖智驾系统。当系统判定有圮绝,不详过窄,它过不去,但你东说念主为判断它能往日,然后开动踩油门催促,此时系统就会在两种判断设施之间纠结,才会导致你在催促的历程中,车辆打标的很迟,不详是不太敢打标的,最终错失了绕过圮绝的最好位置,被卡住。
但特斯拉Model 3,它东说念主机共驾嗅觉就会更好一些。最初是传感器少,濒临复杂环境时,好多东西它的识别和判断有限,是以会更严慎,它才不敢走。但当你踩油门催促,它就会合计你也曾判断好了,前边是没问题的,赶紧它就开动把控距离并打标的,这时候车是不会和东说念主较劲的,智驾系统也不会过多纠结。说白了就是它既信任系统也信任你,是以它在东说念主机共驾的历程中,时机掌抓就更好,反而更容易通过极限场景。
这下,你就不难意会为安在巷子场景下,特斯拉Model 3速率会更快,遴选次数也会更少了吧。
天然通过北京巷子测试,我们也发现非论操纵圮绝物有多紊乱,特斯拉的FSD是可以随时开启的,但阿维塔06就必须得周围的圮绝物不那么近,且车还能识别到我方在车说念内时才调开启。
接下来,望望这两辆车在日常说念路上的一些分离。
在辅路行驶时,Model 3会误将主路限速牌识别为现时说念路限速,将最高时速锁定为80km/h,而阿维塔06则准确判断出限速牌适用界限,保持辅路闲居车速——这种误识别照实存在安全隐患,特斯拉亟待优化。
接下来这个情况,就需要内行维护判断了。那时特斯拉Model 3正在左转,绿灯时它插足了左转专用车说念,此时红绿灯偶合被桥墩挡住,赶紧容貌上的红绿灯渲染消失。但当特斯拉快过住手线时,黄灯亮起了,设施它前轮刚过住手线,左转就红灯了,这时候前边路边还有好多列队恭候通过路口的电瓶车,Model 3在微弱延缓不雅察后,顺利开了往日。你们合计,这算闯红灯么?
在开智驾出入园区历程中,特斯拉Model 3和阿维塔06的感受也很不一样。特斯拉作念不到我方出入园区,是以它一到园区门口,就需要东说念主为遴选。这方面阿维塔06要好不少,它不仅我方上了园区门口的大坡,还精确识别了泊车杆,拐过急弯,就近找了一个难度很高的车位停了进去。关于目生园区,阿维塔06能我方开进来并找车位停好,这个体验照实没得说,这点特斯拉是战胜作念不到的。
既然说到了泊车,咱偶合来试试两辆车的自动泊车体验怎样。我们找了两个难度畸形低的地下泊车场,而且是两侧王人莫得泊车的中间车位。
果然如斯,阿维塔06推崇照旧没啥问题的。在识别到车位后,先上一把,开动倒车,紧接着再上一把诊疗一下傍边间距,临了完好的停在了车位正中间,畸形尺度的一个自动泊车历程。
再来看特斯拉Model 3,在识别到车位后,它先往前上了一把,然后开动倒车,此时标的盘开动来去舞动,设施还没奈何倒,又开动往前挪了一下,并连续倒车,然后再往前,再倒车,并开动跋扈的傍边打标的。设施这还没完,它又往前上了一把,然后再连续倒车,临了停歪了,设施系统还涌现泊车完成。
火暴忙慌的,临了还停歪了,有点不对事理吧。
还没完!接下来,我们望望两车掉头的推崇。
先看阿维塔06。最初是桥上较缓的掉头,06在这里的推崇依然和早岑岭在桥下的时候一样,即等于没车,它在快完成掉头动作,行将要甩正车身的时候,车速照旧会寥落慢。但是在红绿灯路口的掉头,它践诺的就十分松弛,这照实是有小数奇怪。
但要说奇怪,特斯拉Model 3更怪了。明明我们是要掉头,设施它一会儿变到右侧要走非纯真车说念,一会儿要往东说念主家大院里拐,多样骚操作热闹其妙,和之前拍摄特斯拉Model X智驾的时候畸形像。
但不管奈何说,非论是桥上较缓的掉头,照旧红绿灯路口顺利掉头,Model 3倒是王人能完成。就是这乱走的谬误,啥时候能改改。
而且我们在拍摄掉头时,还发现了这两辆车在东说念主性化考量方面的假想各异。
比如在红绿灯路口恭候掉头,Model 3的转向灯是一直在亮着的,舛错是它的声息很大而且很吵,这红绿灯一等就是两三分钟,给东说念主听的王人神经年迈了。阿维塔06就很东说念主性化,它在车辆静止之后,转向灯是会关闭的,直到连续起步之后,转向灯才会连续亮起,这照实感受就要好不少了。
而在环岛方面,非论是阿维塔06照旧特斯拉Model 3,王人可以告成通过,哪怕跑的是车好多且中间还带红绿灯的环岛,两辆车推崇也王人没啥问题。
另外皮小区门口的窄路测试中,两车濒临栅栏、行东说念主及电瓶车等圮绝物时,也王人展现出了优秀通过才调。寥落是搭载ADS 3.3系统的阿维塔06,相较老版块车型,其绕行决策愈加精确,动作衔尾更为清楚,这些细节优化照实带来了显着的体验提高。
举座通过特斯拉Model 3(纯视觉决策)与阿维塔06(激光雷达决策)的多维度实测对比可见,诚然两者在时代旨趣和硬件成立上存在本色各异,但践诺驾驶体验在大多数场景下已趋于接近。
但在顶点复杂场景下,如西直门早岑岭、暗淡乡说念及雨雪浓雾等粗劣见度环境,激光雷达决策的上风就会突显出来了。
毕竟在这种极限环境下,有激光雷达、毫米波雷达、录像头等多样传感器的协同责任,不同传感器之间是可以作念到弥补短板且暴露各自最大上风的,这就比单纯只用录像头要愈加靠谱,也愈加高效一些。
是以在我们测试中,内行才会嗅觉到阿维塔06的智驾一致性会更好一些,它受到环境的影响也更小,在碰到多样天气,多样情况时,推崇王人会较为踏实。但特斯拉Model 3受环境影响就会更多,不怜悯况下智驾推崇的各异,也就会比阿维塔06更大,体感落差也更显着。
个东说念主认为,这两种智驾决策并莫得显着的优劣之分,阿维塔这样作念,是出于安全至上,和保证智驾相宜性行动起点的。而特斯拉这样作念,一方面出于镌汰资本,另一方面更进军的原因是,行动全球车型,它是领有遍布寰宇各地的海量数据的,有如斯重大的数据量行动考验基础,才调让特斯拉定心的礼聘纯视觉决策,况兼其推崇还能与激光雷达决策相似。
是以你们更倾向于哪一种智驾决策呢?驳倒区来说说吧。
本文由极果用户极果原创九游娱乐(中国)有限公司-官方网站